
关于搜索算法的复习

1. 为什么需要查找算法?
Rational Agent需要执行一系列行动,以实现目标。这种情况下可以给Agent提供一个“行动手册”,告诉它什么情况下该做什么事。
但是“行动手册”很难构造,因为很难直接预料到事情可能发生的所有情况。
所以更一般的方法是Agent了解世界以及其行为如何影响世界,通常通过搜索由世界状态构成的的内部建模空间来完成。
2. “解决问题”的任务
给定:
- 世界的初始状态。
- 可执行的一组操作。
- 目标检测:该检测可以被应用到世界的每一个初始状态上,来判断这个状态是不是目标状态。
寻找:
- 以状态和运算符路径形式的解决方案,显示如何将初始状态转换为满足目标测试的状态。
- 初始状态和运算符集隐含的定义了一个状态空间,即执行一个操作序列后,都可以从初始状态到达的一个目标状态。
3. 表现的衡量
- 路径成本Path Cost:一个为路径分配成本的函数,通常通过将路径中各个运算符的成本相加。总是希望找到成本最低的解决方案(最优)。
- 搜索成本Search Cost:找到解决方案所需的计算时间和空间(内存)。
- 通常的解决方案是在搜索成本和路径成本之间折中,目的是必须在可用时间内找到最佳解决方案。
4. 搜索策略
- 实施各种搜索策略的最简单方法是维护一个未扩展的搜索节点队列。
- 不同的策略源于在队列中插入新节点的不同方法。
搜索策略的属性:
- 完整性-保证找到解决方案(如果有)?
- 最优性-是否找到最佳解决方案?
- 时间复杂性-找到解决方案需要多长时间?
- 空间复杂度-搜索过程中需要多少内存?
5. 搜索算法
| 无信息的搜索算法 | 有信息的搜索算法 |
|---|---|
| 深度优先 | 贪婪最佳优先 |
| 广度优先 | A* |
| 一致代价 | 记忆有界的启发式 |
| 深度有限 | |
| 迭代加深 | |
| 双向搜索 |
无信息的都是暴力搜索。
6. Big O表示时间空间复杂度
教程:时间复杂度和空间复杂度,大O表示法【数据结构和算法入门2】
7. 无信息的搜索算法
无信息的都是暴力搜索。
7.1 宽度优先搜索
逐级展开搜索节点,在展开d+1级节点之前,将展开d级的所有节点。

•完备性-该算法最终访问给定深度的每个节点,当分支因子有限时他是完备的。 •最优性-提供的路径成本是节点深度的一个非减损函数时(例如,所有操作都有相同的成本),他是最优的(即节点到节点的费用与节点深度成正比)。
那么什么情况下不是最优的呢?个人理解:
例如现在有ABC三个地点,以及他们的对应代价(比如A-C中间有个收费站,需要花5块钱)。
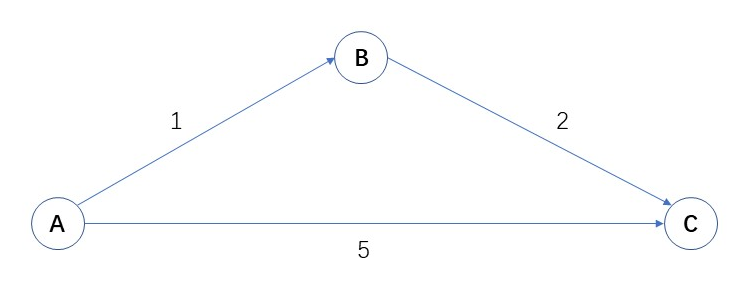
应用广度优先搜索求应该如何A到C。
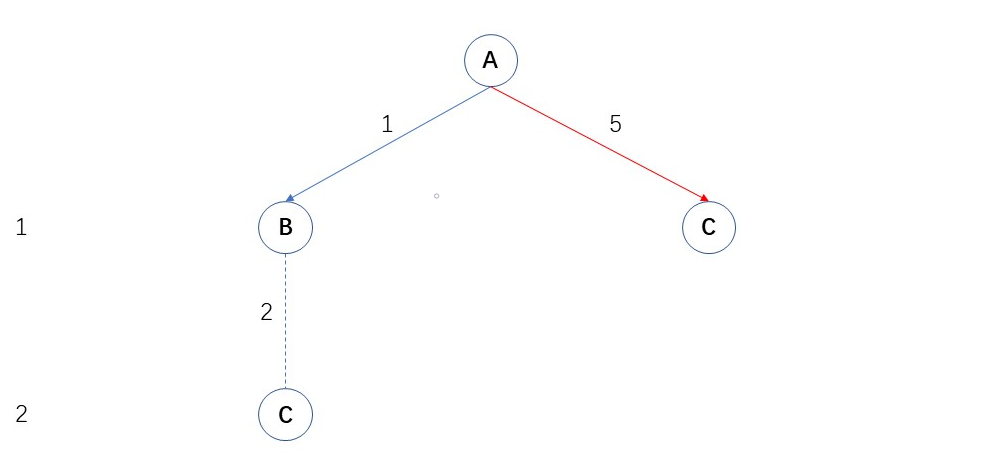
在第一级节点扩张的时候,他就找到了C,然后就中止(如果允许提前退出的话)。所以如果考虑路径成本的的话,直接从A到C并不是最优解。 但是这么做扩张的节点层数少,相应的节省了一点搜索成本。
7.1.1 宽度优先搜索的复杂度
假设每次平均扩展\(b\)个节点,称之为分支因子。
时间复杂度:找到深度\(d\)范围内的最佳解决方案,需要\(1+b+b^2+…+b^d=O(b^d)\),即最坏需要遍历所有的点。
空间复杂度:需要内存大小为\(O(b^d)\)的边缘节点集。
7.2 一致代价搜索
与广度优先类似,不同之处在于总是扩展路径成本最低而不是深度最小的节点(即按路径成本对新队列排序)。
直到目标是队列中成本最低的节点(即,当进行扩展时当发现目标节点),才识别目标。
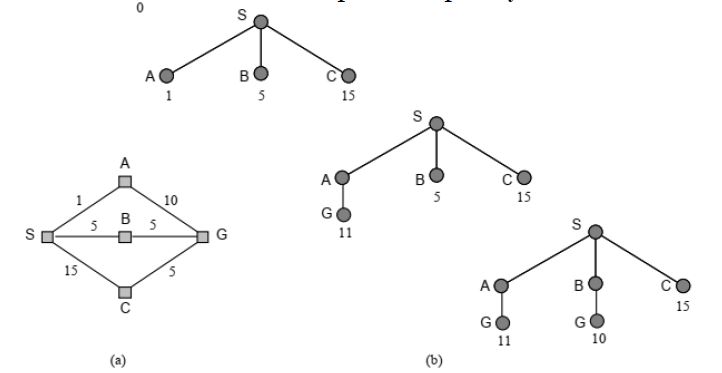
因此,具有非负数的阶跃成本最优(在最坏情况下也意味着更高的时间和空间复杂度)
7.3 深度优先搜索
始终在树的最深处展开节点,即最近生成的节点之一。当遇到死胡同时,回到最后的选择。(不撞南墙不回头,一路走到黑)
7.3.1 深度优先搜索的属性
- 不完备的:可能会沿着无限路径迷路。
- 非最优解:可以在探索较浅的解决方案之前找到更深的解决方案。
- 时间复杂度:最坏情况下为\(O(b^m)\),注意\(m\)(状态空间的最大深度,可以为无限大)可能比\(d\)(目标结点的深度)大。
- 空间复杂度:\(O(bm)\),\(m\)为树的最大深度。队列只包含从根节点到叶节点的一条路径,以及路径上每个节点的其余同级节点。
- 可以添加深度限制𝑙 防止探测超过给定深度的节点。
咋理解这个空间复杂度呢? 深度优先算法的优势在于,在开辟一个新节点的时候,只要保存一条路径上的同级节点即可。
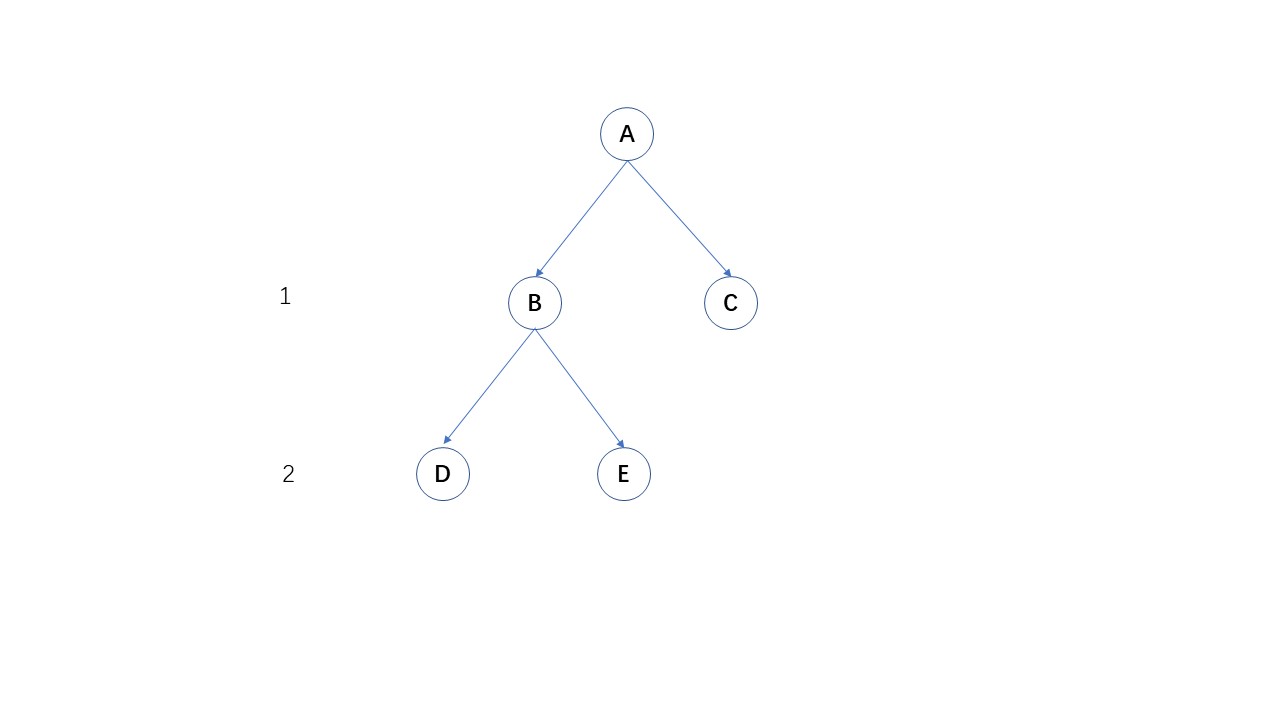
在这种情况下,空间复杂度为\(O(2\times2)\)
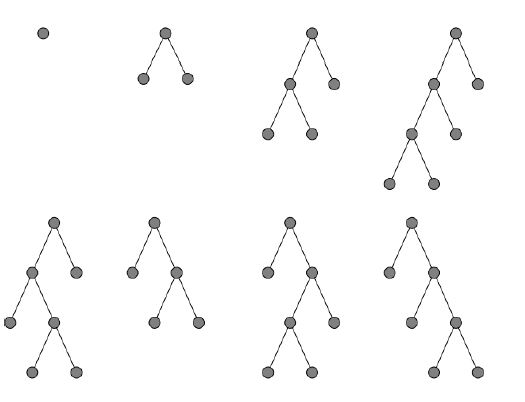
7.4 迭代加深的深度优先搜索
做法是不断增加深度限制来应用深度优先搜索,0,1,2……d,直到找到目标。
这种情况并没有增加多大的\(cost\),因为大多数节点都在下方,上方多生成几次无所谓的。
底层节点生成了一次,倒数第二层节点生成了两次,以此类推,所以一共生成了\((d)b+(d-1)b^2…+(1)b^d\)个节点。
- 时间复杂度:\(O(b^d)\)
- 空间复杂度:\(O(bd)\)
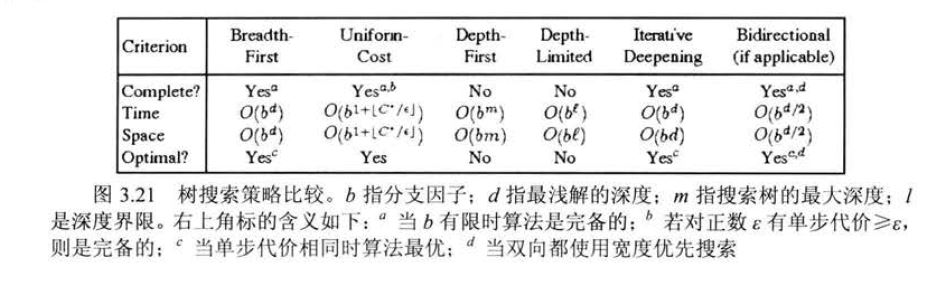
7.5 无信息搜索策略总结
8. 减少重复
减少重复检测同一状态的方法:
- 不跟随自循环(将分支移动回相同的状态)。
- 不创建具有循环的路径(删除路径上已存在的返回根的分支)。
- 不要生成任何已生成的状态。需要存储所有生成的状态并搜索它们(通常使用哈希表以提高效率)。
9.有信息的搜索算法
非暴力。
9.1 贪婪最佳优先搜索
我想去北边的德克士,但是我不知道路。那我一直往北走摸过去就好了。
\(f(n) = h(n)\);
- 不完备的:可能会沿着无限路径迷路。(如果启发式h合理的话这种情况可以避免)
- 最优性:不是最优的。
- 时间复杂度:最坏情况下为\(O(b^m)\),注意\(m\)(状态空间的最大深度,可以为无限大)可能比\(d\)(目标结点的深度)大。
- 空间复杂度:最坏情况下\(O(b^m)\)。
但是,高质量的启发式可以大大减少时间复杂度和空间复杂度。
9.2 A*
\(f(n) = g(n)+h(n)\); \(g(n)\)是\(cost\)函数。
- 时间复杂度:最坏情况下为\(O(b^d)\)
- 空间复杂度:最坏情况下\(O(b^d)\)
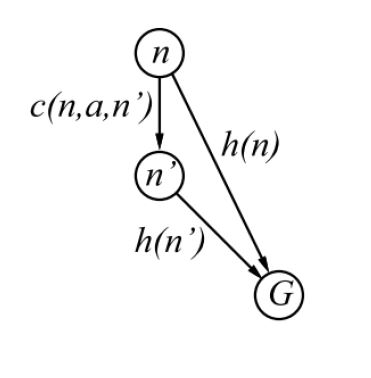
对于树搜索: 最优性的保证是\(admissible\)的启发式,即启发式h(n)要小于等于\(h(n’)\)。其中\(h(n’)\)为真实的损耗。 对于图搜索: 最优性的保证是\(consistent\)的启发式, \(h(n)\leqslant c(n,a,n’)+h(n’)\)
\(consistent\)的理解:如果对于每个结点\(n\)和通过任一行动\(a\)生成的\(n\)的每个后继结点n',从结点n到达目标的估计代价不大于从\)n\)到\)n’\)的单步代价与从\)n’\)到达目标的估计代价之和.
说人话就是两边之和不能大于第三边,即通过启发式估计出来的损耗路径要比真实的小。
9.2.1 A*的速度和准确率
- 如果启发式\(h\)等于0,那么就只考虑代价搜索,成一致代价搜索了。是可以找到最优解的,但是搜索成本大。
- 如果启发式\(h(n)\)准确的等于\(h(n’)\),那搜索成本特别小,找到的也是最优解。但是这种情况太理想了(特殊情况下才可能实现)!
- 如果启发式\(h(n)\)过大,那他就不考虑前面的cost了,相当于贪婪最佳优先搜索了。
结语
我说怎么看了Ola的ppt一天也没看明白,原来ppt上是错的……
学好数据结构很重要。
参考
[1]StuartJ.Russell, PeterNorvig, 诺维格,等. 人工智能:一种现代的方法[J]. 清华大学出版社, 2013.