ROS学习笔记 02 ROS的定义与核心概念
前言
系统环境: Ubuntu 18.04,硬盘安装。
ROS版本: melodic
深蓝学院(古月居)胡春旭ROS理论与实践笔记整理。
1. ROS的定义与组成
ROS = 通信机制+开发工具+应用功能+生态系统。
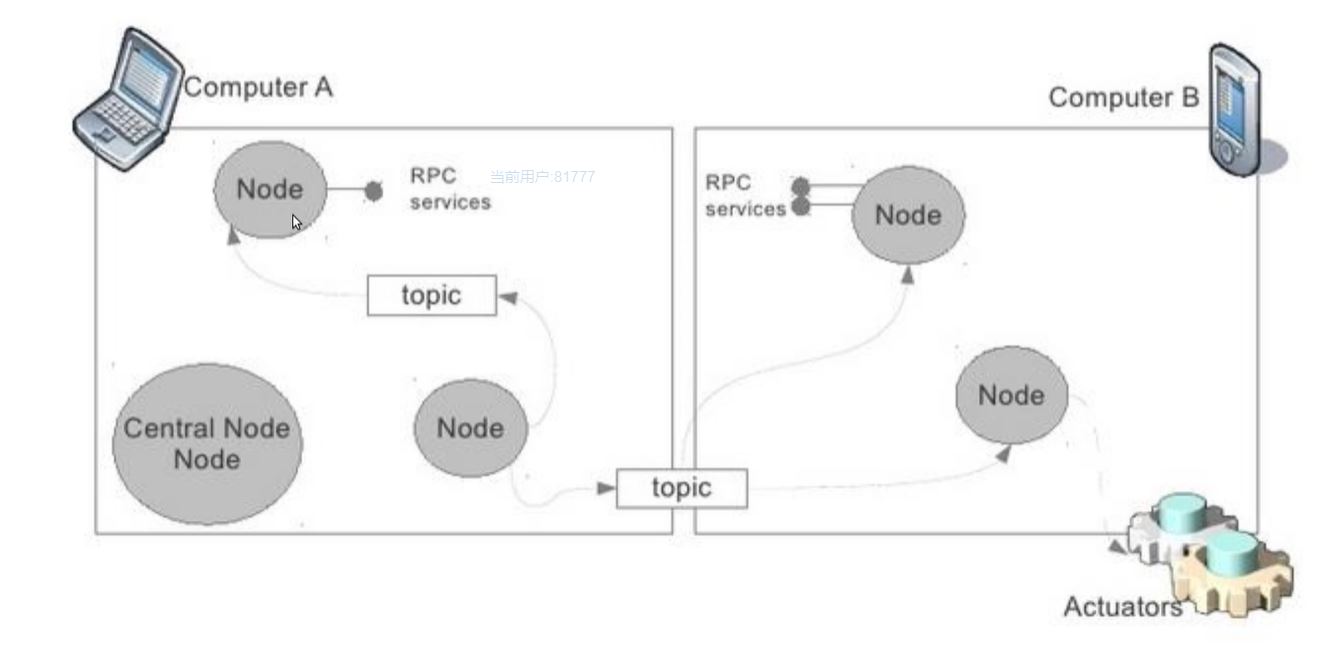
1.1 通信机制
松耦合分布式通信。
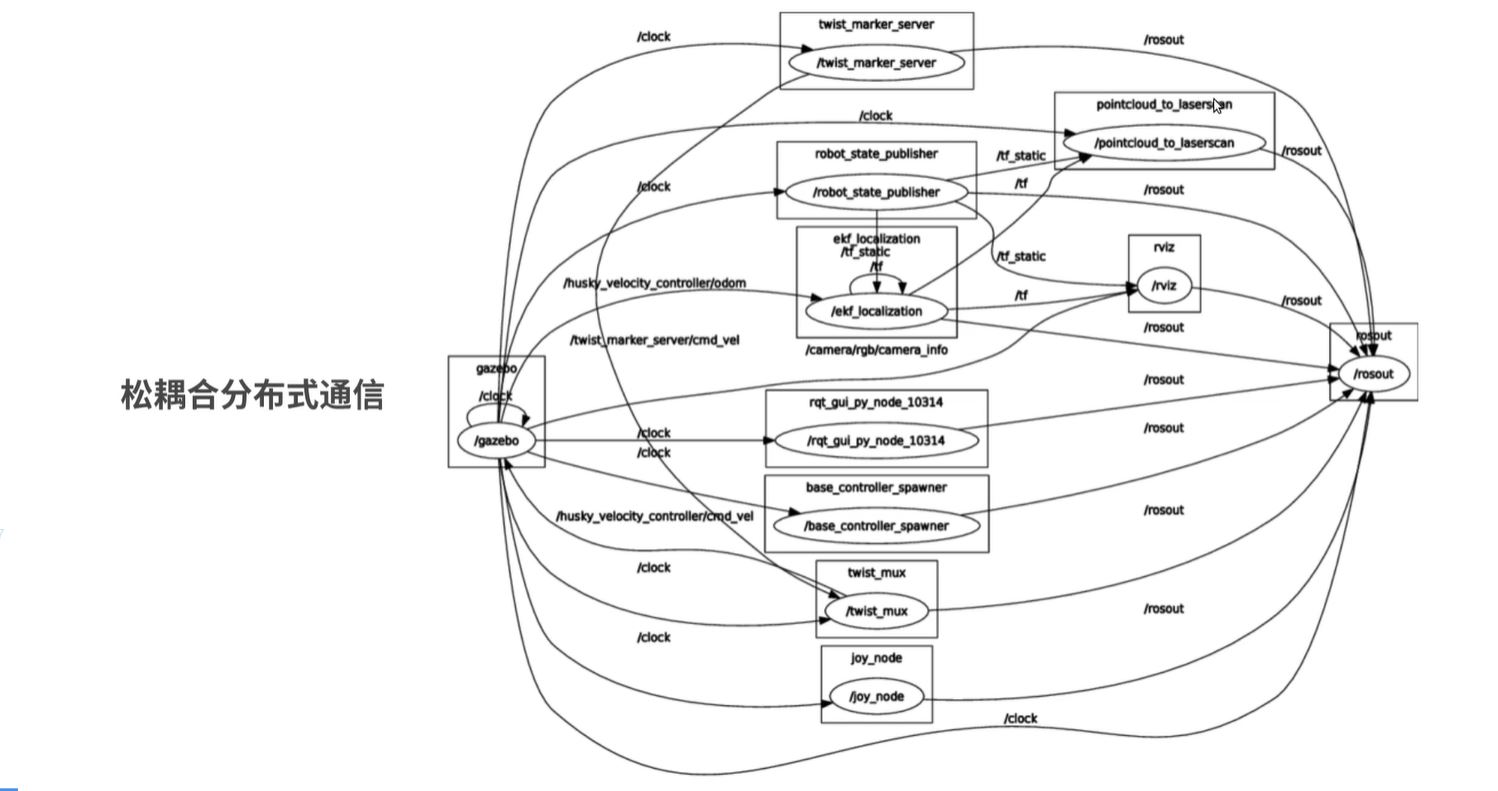
比如组员A可以在他自己的电脑上用python实现节点A的功能,组员B可以在他自己的电脑上用C++实现节点B的功能。只要这两个节点相互通信就好了。这就是松耦合分布式。
1.2 开发工具
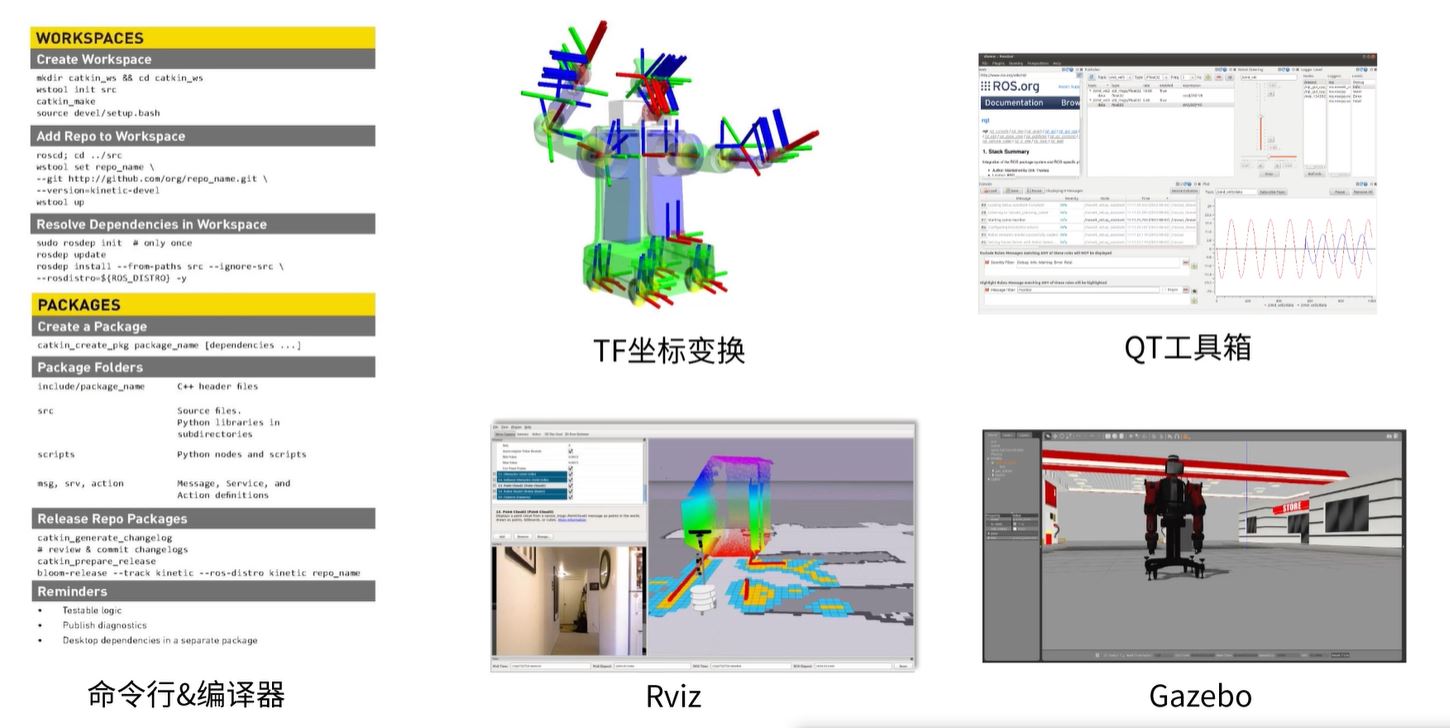
1.3 应用功能
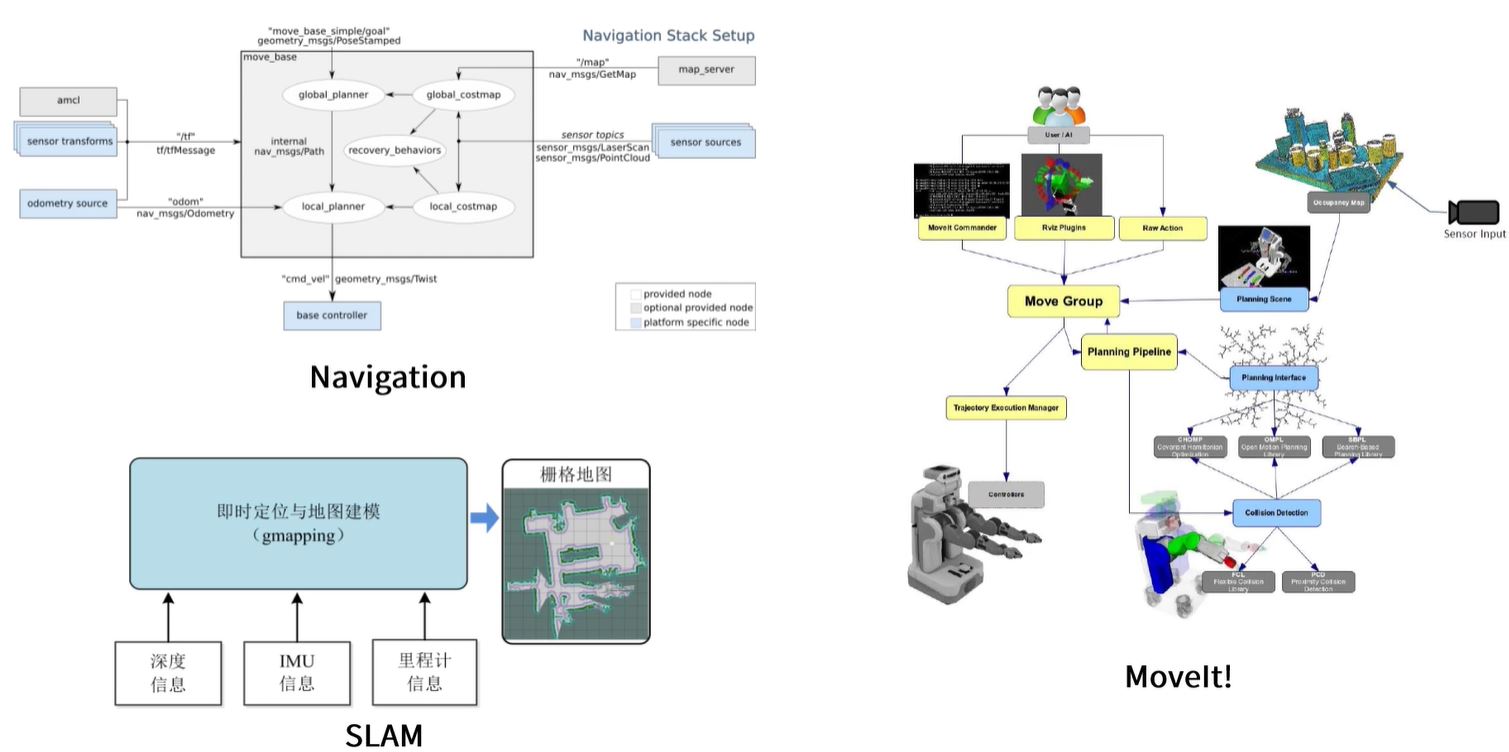
这些都是框架。
1.4 生态系统
官网、论坛啥的。
2. 核心概念和通讯机制
节点(Node)–执行单元
- 执行具体任务的进程、独立运行的可执行文件;
- 不同节点可使用不同的编程语言,可分布式运行在不同的主机;
- 节点在系统中的名称必须是唯一的。
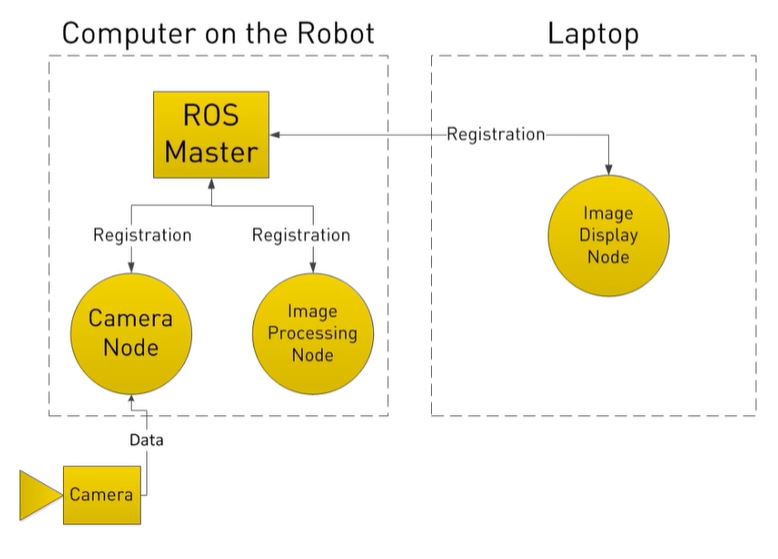
节点管理器(ROS Master)– 控制中心
- 为节点提供名命和注册服务;
- 跟踪和记录话题/服务通信,辅助节点相互查找、建立连接;
- 提供参数服务器,节点使用此服务器存储和检索运行时的参数。
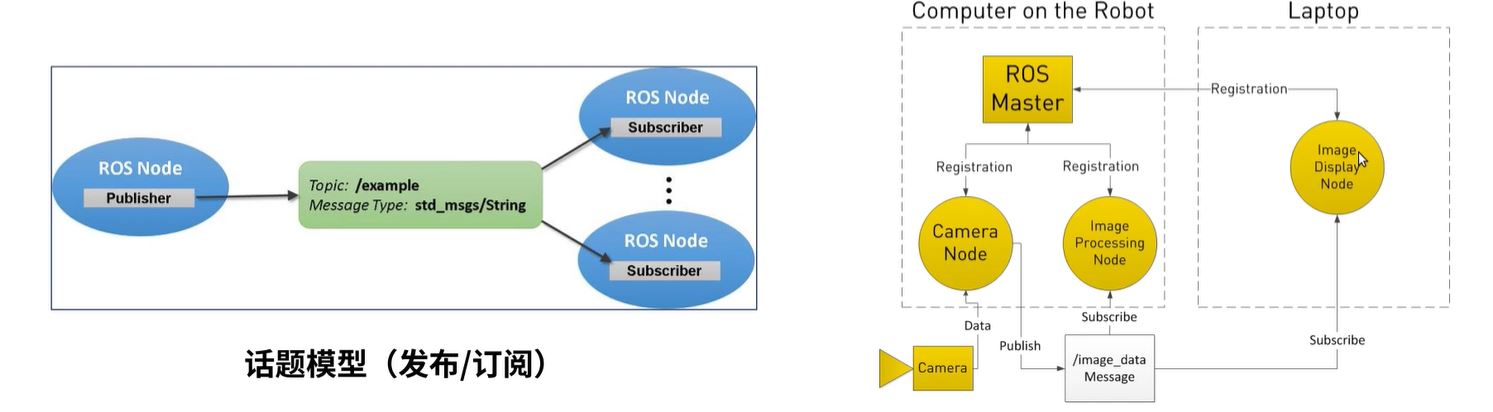
话题(Topic)–异步通信机制
- 节点间用来传输数据的重要总线;
- 使用发布/订阅模型,数据由发布者传输到订阅者,同一个话题的订阅者或发布者可以不唯一。
消息(Message)– 话题数据
- 具有一定的类型和数据结构,包括ROS提供的标准类型和用户自定义类型。
- 使用编程语言无关的*.msg*文件定义,编译过程中生成对应的代码文件。
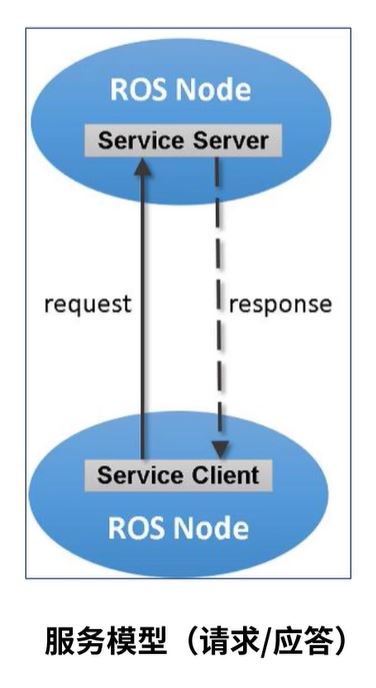
服务(Service) – 同步通信机制
- 使用客户端/服务器(C/S)模型,客户端发送请求数据,服务器完成处理后返回应答数据;
- 使用编程语言无关的*.srv*文件定义请求和应答数据,编译过程中生成对应的代码文件。
服务与话题的区别:

- 异步性:发出去不管收没收到(类似于UDP)。
- 异步性:发出去一定要等待反馈(类似于TCP/IP)。
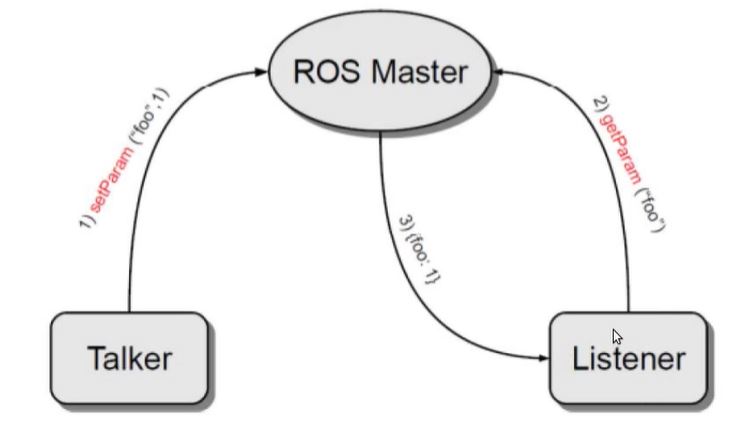
参数(Parameter)– 全局共享字典
- 可通过网络访问的共享、多变量字典;
- 节点使用此服务器来存储和检索运行时的参数;
- 是和储存静态的、非二进制的配置参数。
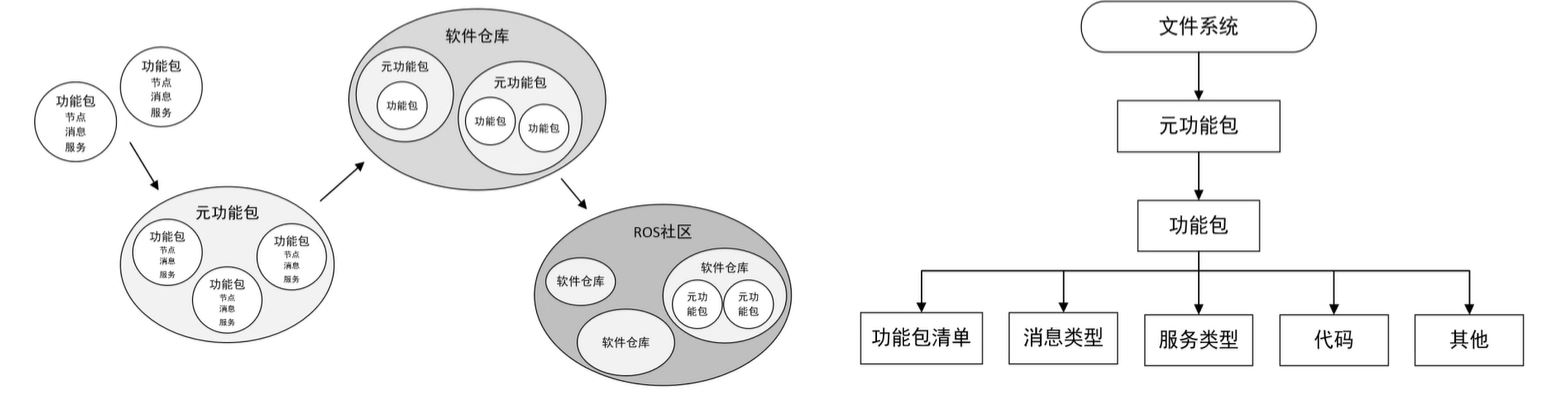
功能包(Package)
- ROS软件中的基本单元,包含节点源码、配置文件、数据定义等。
功能包清单(Package manifest)
- 记录功能包的基本信息,包含作者信息、许可信息、依赖选项、编译标志等。
元功能包(Meta Packages)
- 组织多个用于同一目的的功能包
3. 小海龟仿真分析
- 常用命令:
1 | rostopic |
- 小海龟命令行分析:
1 | # 用来启动ros核心,也就是ros master节点。 |
- ROS可视化工具:
rqt_graph
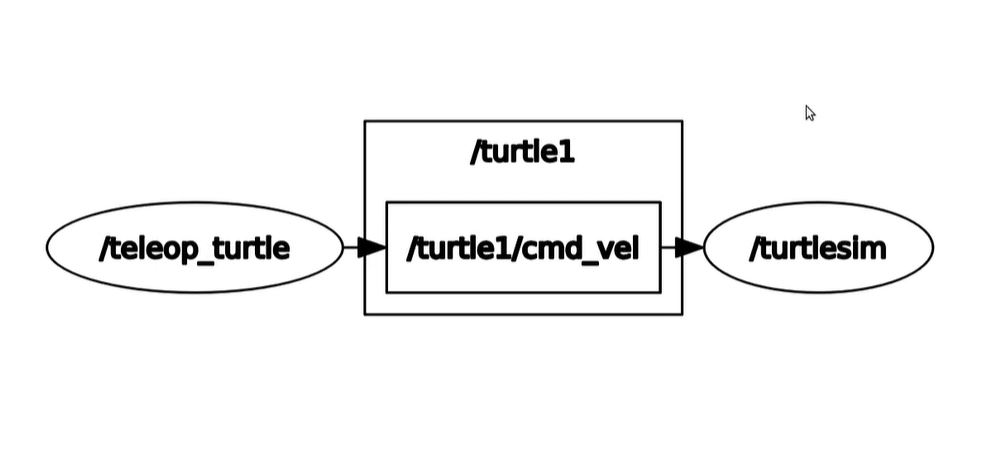
分析:椭圆形就是节点,/turtule1就是topic,/turtle1/cmd_vel是包含速度指令的topic,表示速度velocity。
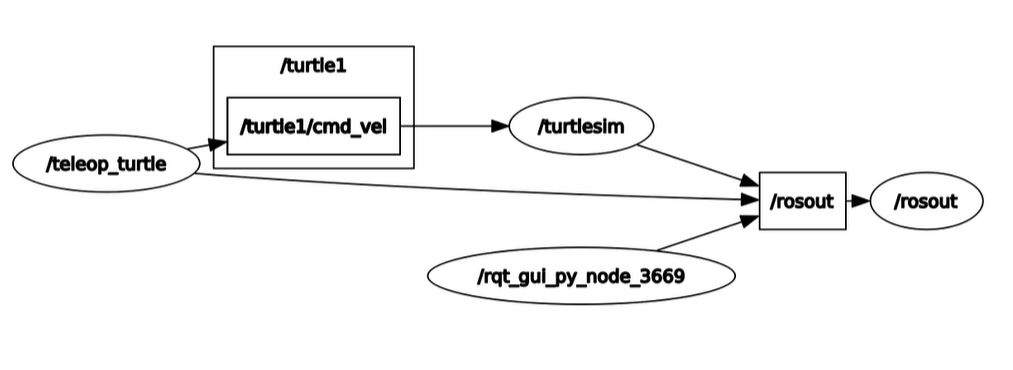
分析:/rosout是ros master启动后默认启动的一个节点,会保存所有结点的日志信息。
rosnode的使用方式
1 | # 打印所有的节点 |
rostopic的使用方式
1 | # 例如,结点/turtlesim正在发布海龟1的位置信息/turtle1/pose(这个是话题) |
rosservice的使用方式
1 | # 请求一只按照新的参数新产生的海龟 |
- ROS可视化工具:
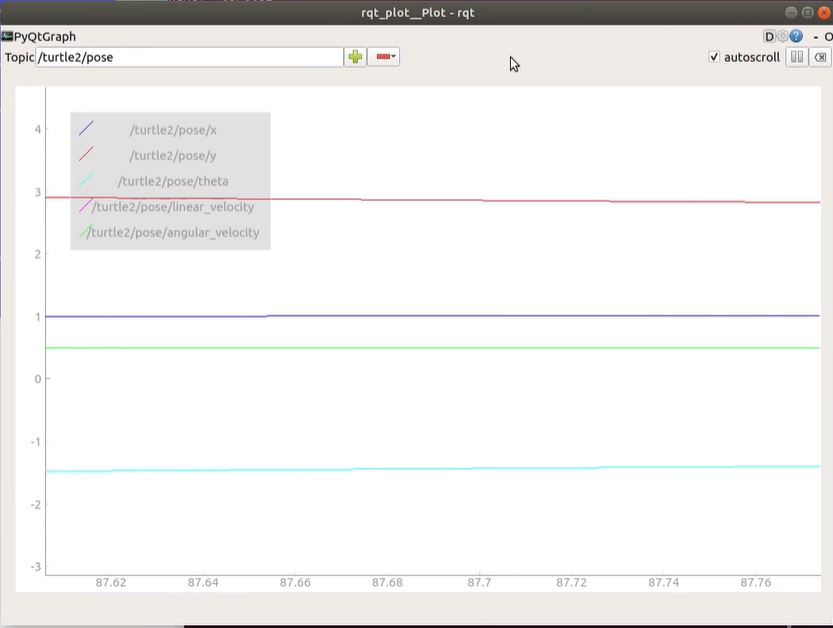
rqt_plot
左上角添加topic,就可以实时打印某一话题里的数据内容。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 孙健耕的博客!